

Przedstawiamy serię [[PL178]] Moose
Moose to coś więcej niż tylko skaner o wysokiej precyzji; to inteligentniejsze rozwiązanie do skanowania. Dzięki zaawansowanemu śledzeniu AI i innowacyjnemu algorytmowi chmury punktów, Moose przeniesie wydajność i jakość skanowania na nowy poziom.







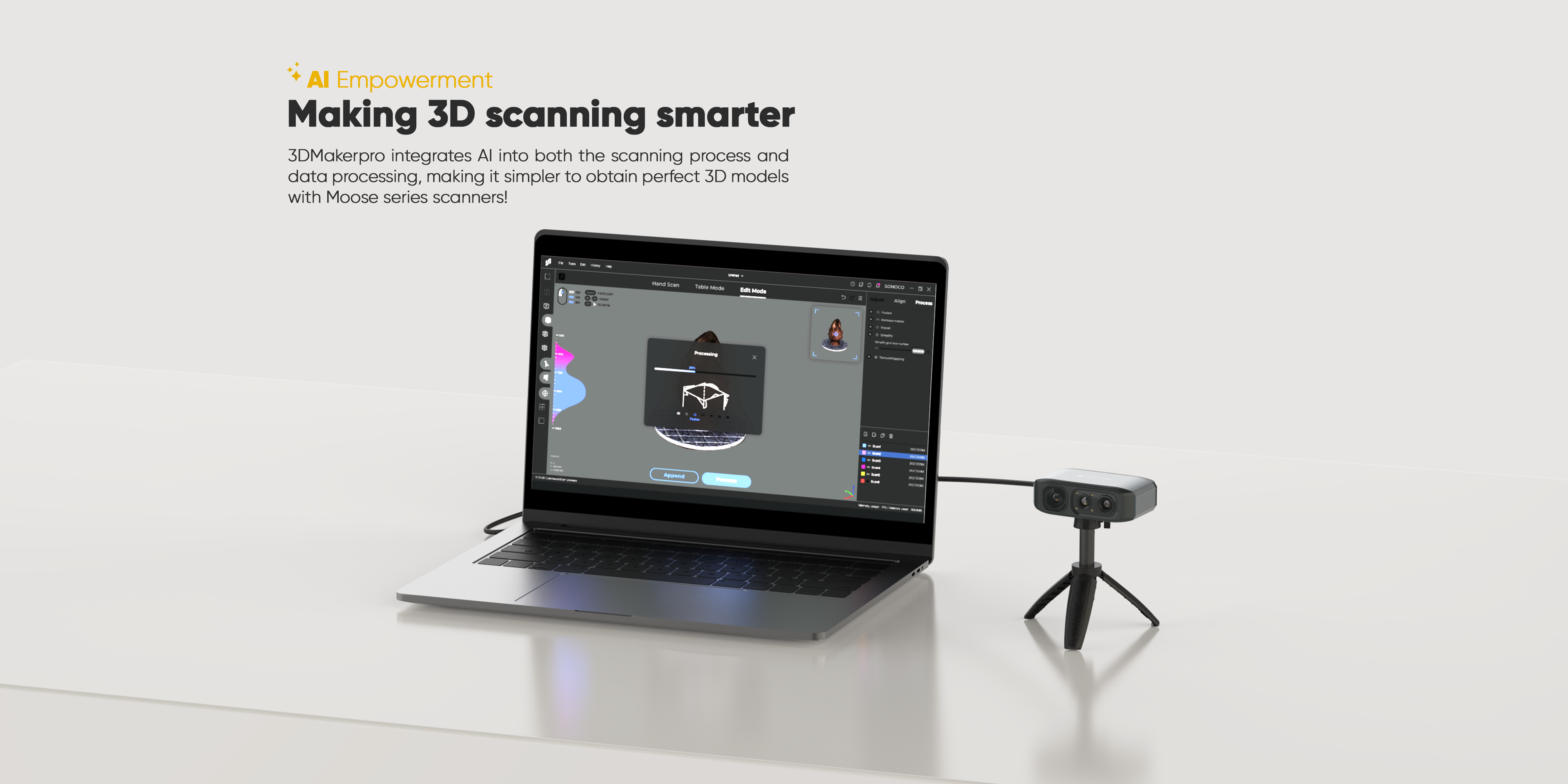

Inteligentne przetwarzanie danych przed i po
Oprogramowanie do skanowania JMStudio integruje skanowanie, edycję i optymalizację w jednym bezproblemowym procesie.
Śledzenie wizualne AI
Seria Moose jest wyposażona w nową generację kodowanych jednoklatkowo jednostek światła strukturalnego, które poprawiają wykrywanie cech powierzchni, zapewniając płynne skanowanie bez znaczników.
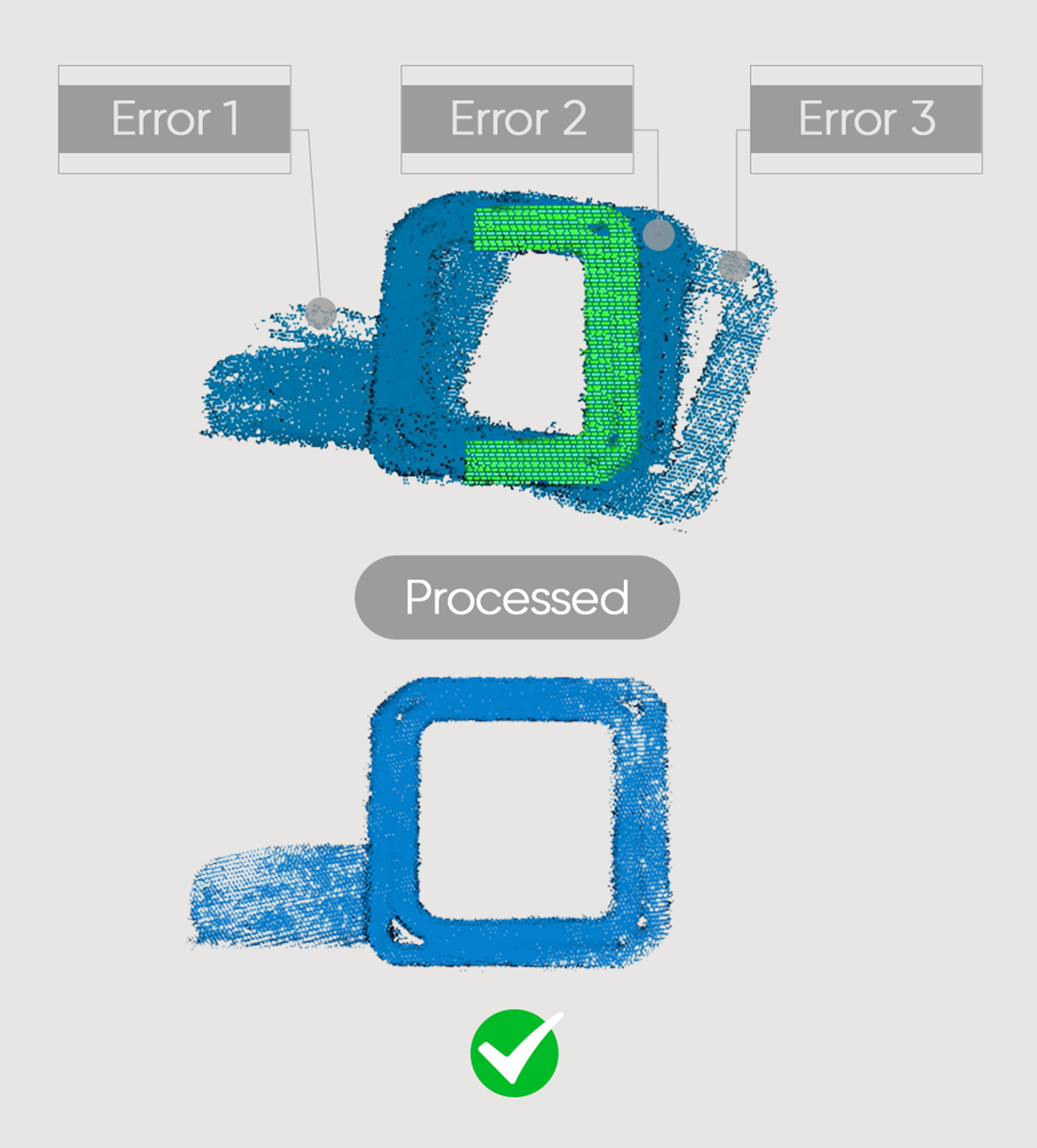
Inteligentna korekcja błędów
AI eliminuje wadliwe lub źle wyrównane dane z chmury punktów, zachowując dokładne punkty.
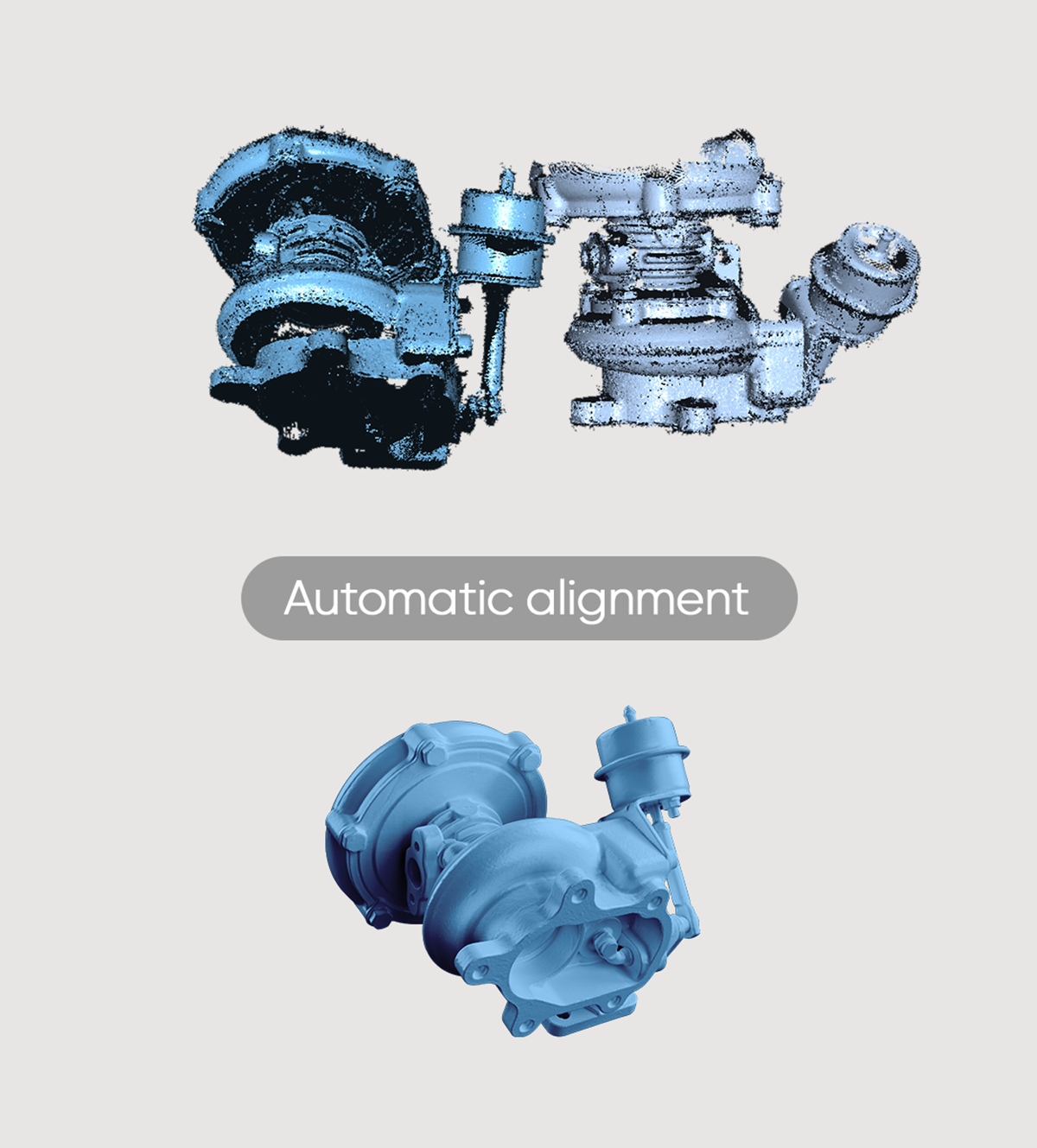
Automatyczne wyrównanie
JMStudio może automatycznie zszywać w większości scenariuszy, zapewniając bezproblemowe połączenia.


Zwiększ w stosunku do poprzedniej generacji:
40%
More accuracy¹
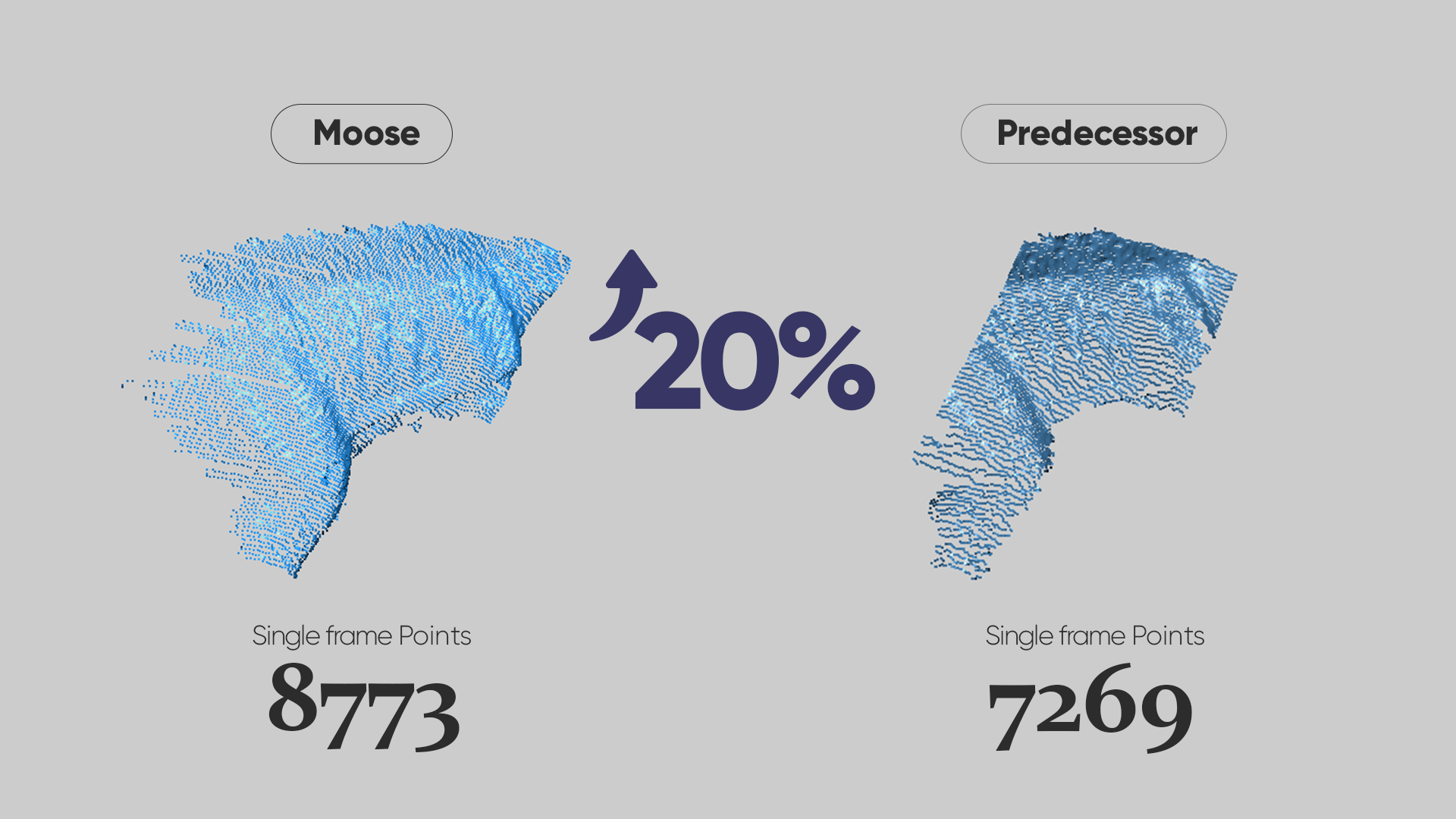
20%
More resolution¹
Dokładność prawdziwa
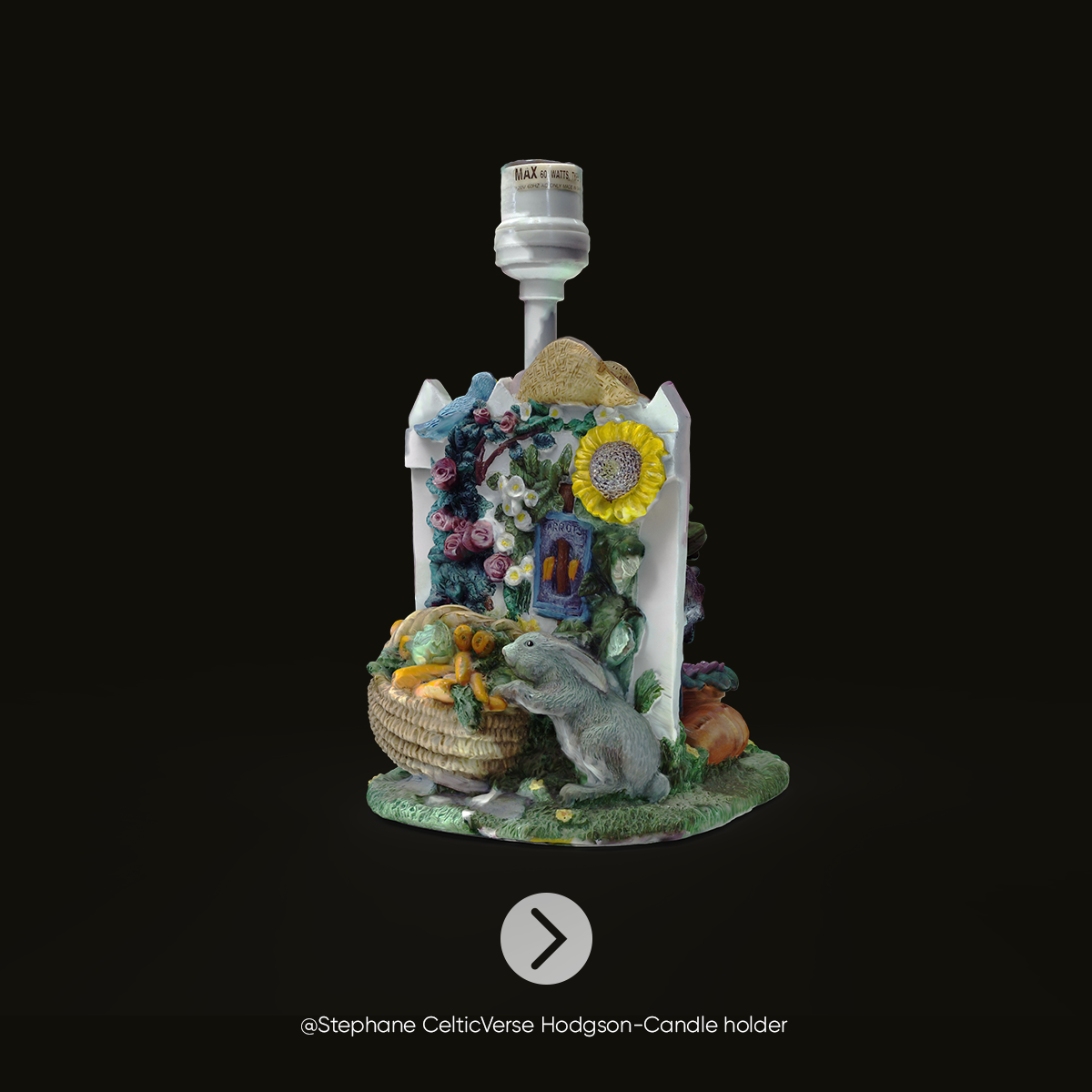
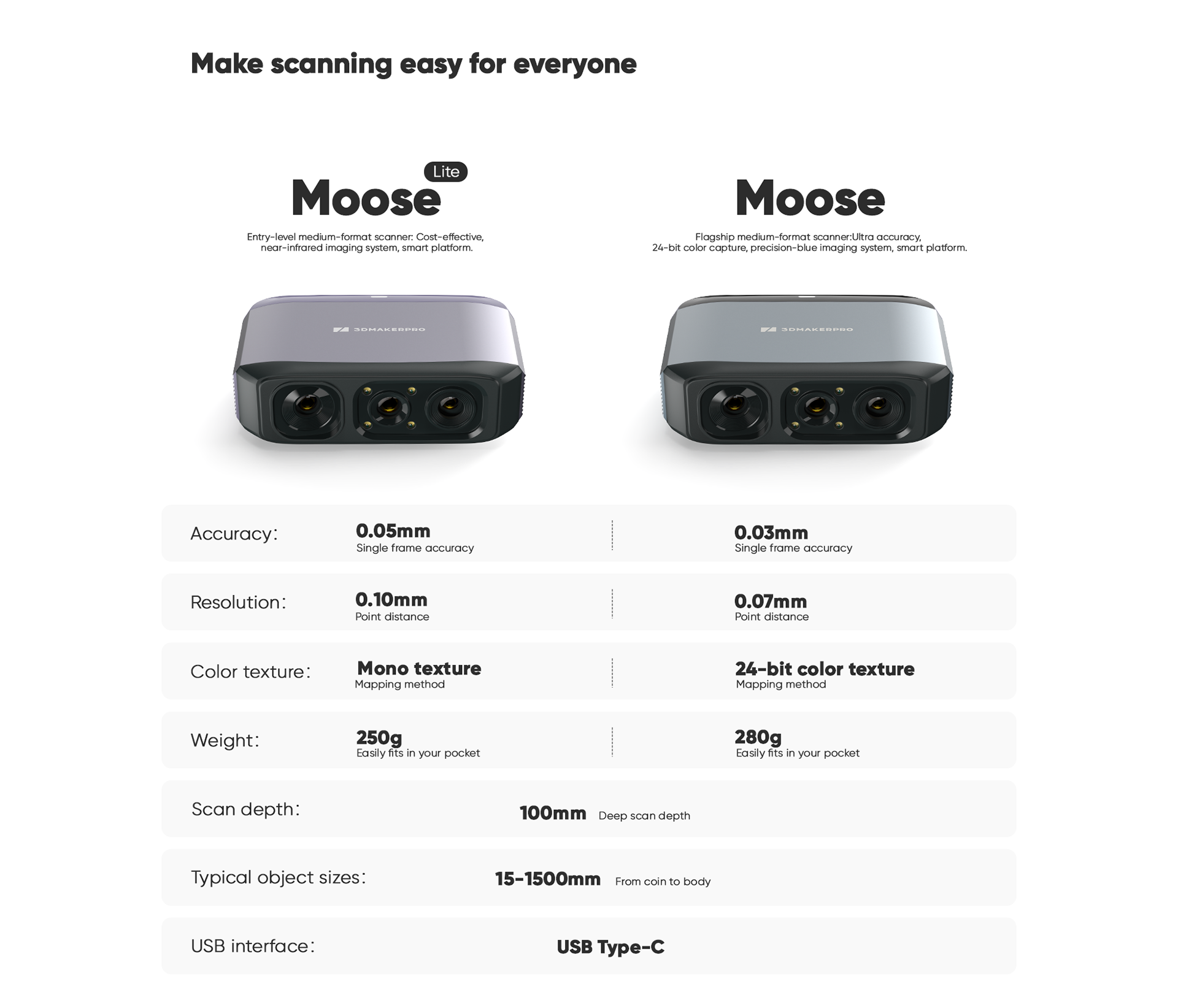
Dzięki technologii światła niebieskiego seria [[PL178]] Moose może osiągnąć dokładność rzędu 0,03 mm². To sprawia, że rozmiar twojego modelu jest nieskończenie zbliżony do rzeczywistości

Rzeczywiste Turbo

Model 3D Turbo
Z 0,05mm resolution³
Szczegółowe chmury punktowe doskonale zachowują szczegóły obiektu, zapewniając wyrafinowane modele do drukowania lub wyświetlania projektów.
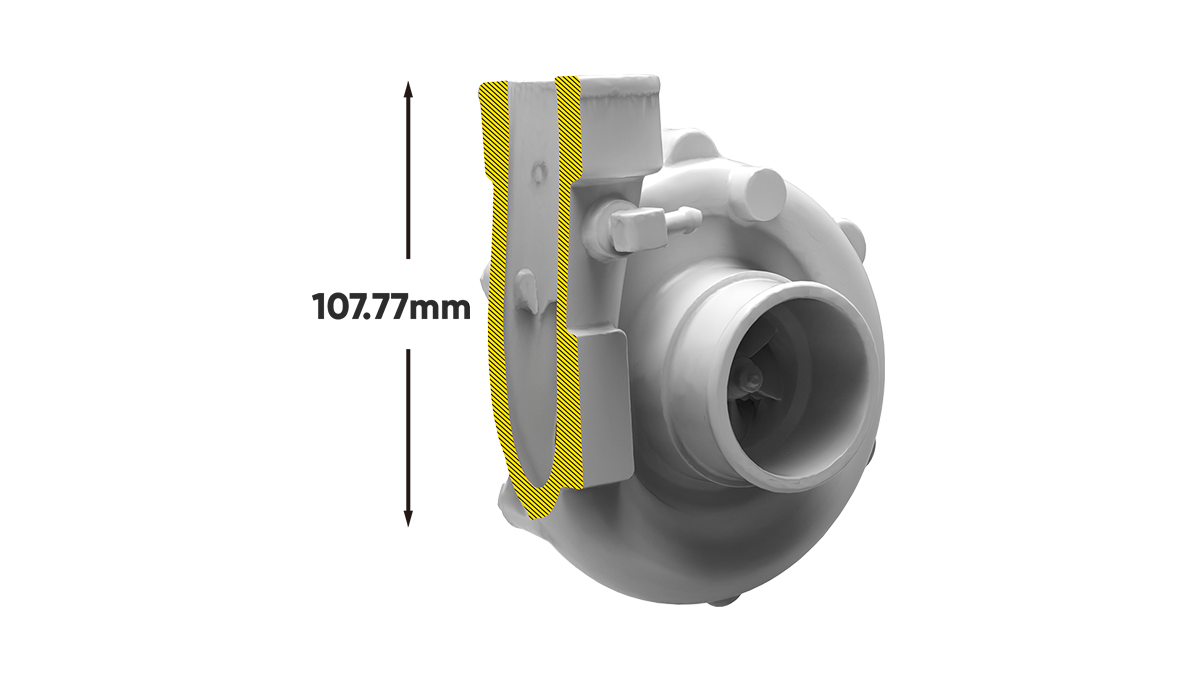
Głębokość skanowania do 100mm
Ulepszona eksploracja głębokości znacznie poprawia możliwości skanowania pionowego obejmującego kompleksowo złożone modele, nawet te o skomplikowanych strukturach.

I jest więcej

Wrap geomagiczny dla 3DMakerpro
FAQ
Jak mogę kupić Moose / Moose Lite?
Moose/ Moose Lite będzie można kupić 28 marca o godz. 10:00 czasu wschodniego i 15:00 czasu GMT w sklepie store.3dmakerpro.com , a Ty możesz się zapisać, aby jako pierwszy otrzymać powiadomienie o premierze!
Czy muszę osobno kupować oprogramowanie do skanowania?
Nie, nasze oprogramowanie JMStudio jest rozwijane we własnym terenie i jest bezpłatne. Obsługuje 8 głównych języków i obejmuje skanowanie, edycję chmury punktów, inteligentną optymalizację chmury punktów, wielopunktowe wyrównanie chmury, fuzję chmury punktów i eksport w formatach OBJ/STL/PLY/ASC i nie tylko.
Czy wymagane jest szkolenie zawodowe?
Oferujemy kompleksowe przewodniki dla początkujących (wielu może nawet pominąć te przewodniki i rozpocząć skanowanie bezpośrednio), wraz z wyraźnymi monitami skanowania. Skoncentruj się na skanowaniu, nie dostosowując parametrów.
Czy możemy bezpośrednio wydrukować skanowane modele 3D?
Tak, pliki STL można bezpośrednio importować do wszystkich aplikacji do krojenia.
Czy karta graficzna NVIDIA 1060 może obsłużyć oprogramowanie?
Tak, 1060 to nasza zalecana konfiguracja. Minimalne wymagania to Intel Core i5 8th gen, 16GB RAM i zintegrowana grafika.
Czy stosowanie markerów jest konieczne do skanowania?
Moose/ Moose Wersja Lite wykorzystuje technologię AI Visual Tracking firmy 3DMakerpro i nie wymaga stosowania markerów do skanowania.
Które systemy operacyjne są obsługiwane przez oprogramowanie do skanowania?
Windows 10/11 64-bit, MacOS 12/13, po stronie mobilnej używanej do łączenia się z Smart Grip: Android 10.0 lub nowszy, iOS 15.0 lub nowszy.
Jakiego rodzaju zasilanie oferuje Moose / Moose Lite? Czy można go używać w moim kraju?
Może być używany globalnie i obsługuje napięcie 100-240V AC.
1. Dane te pochodzą z porównania Moose i [[PL170]].
2. Dokładność pojedynczej klatki Moose wynosi 0,03 mm, a Moose Lite — 0,05 mm. Dane te są testowane przez [[PL178]] .
3. Rozdzielczość modelu Moose wynosi 0,07 mm, a modelu Moose Lite — 0,10 mm. Dane te są również testowane przez [[PL178]] .
4. Głębokość skanowania jest testowana przez 3DMakerpro. Rzeczywista głębokość zmienia się w zależności od pola przekroju wejścia do obiektu skanującego.



